Make X Robotics Competition 2024
Description
My first robotics related paying job in Australia. Through the Engineering for kids organizations, I was able to connect and participate in the Make X robotics competition as a mentor for a 11 grade student.

Skills learned:
- Intermediate CAD.
- Gained proficient in SolidWorks sketching, extrusion and entry level motion study.
- Mentoring and communication.
The Game's Rules (Download the PDF file)
Arena:
- Dimension: 4.6x3.0 (meters)
- Surrounded by a 40 centimeters high barrier
- Includes:
- 2 Starting area on each side (2v2)
- Disc area
- Main resource area: cube and shelf
- Other resource areas(less score)
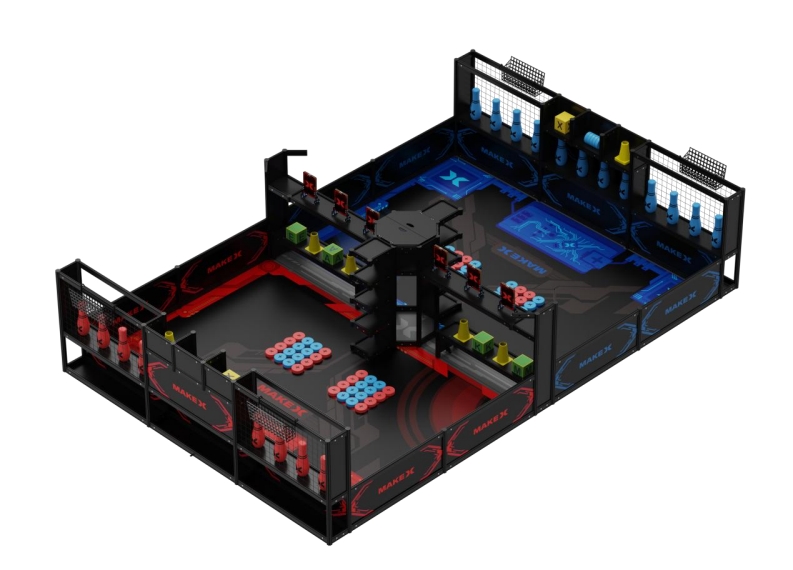
The platform from the top view
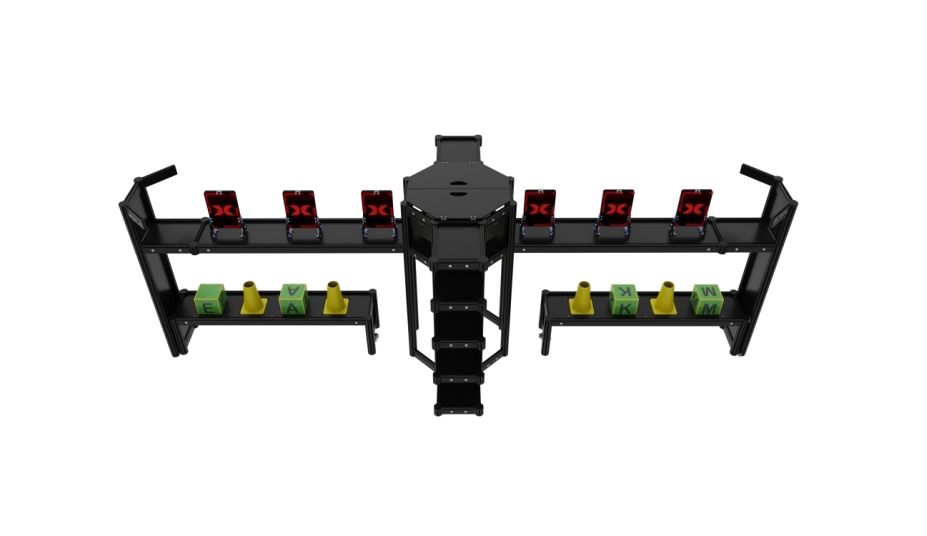
Main resource area
Objective (simplified):
- Shoot red/blue disc into the storage area to gain point, shoot blue/red disc into the panel to knock it over the the other side
- Move boxes from a shelf to a different shelf with different height to create the word "MAKEX"
Mechanics
Drive-base:
a. Basic idea
- 4 motors at 4 corners of the robot
- Each motor is equiped with mechanum wheel, allowing the robot to move sideway
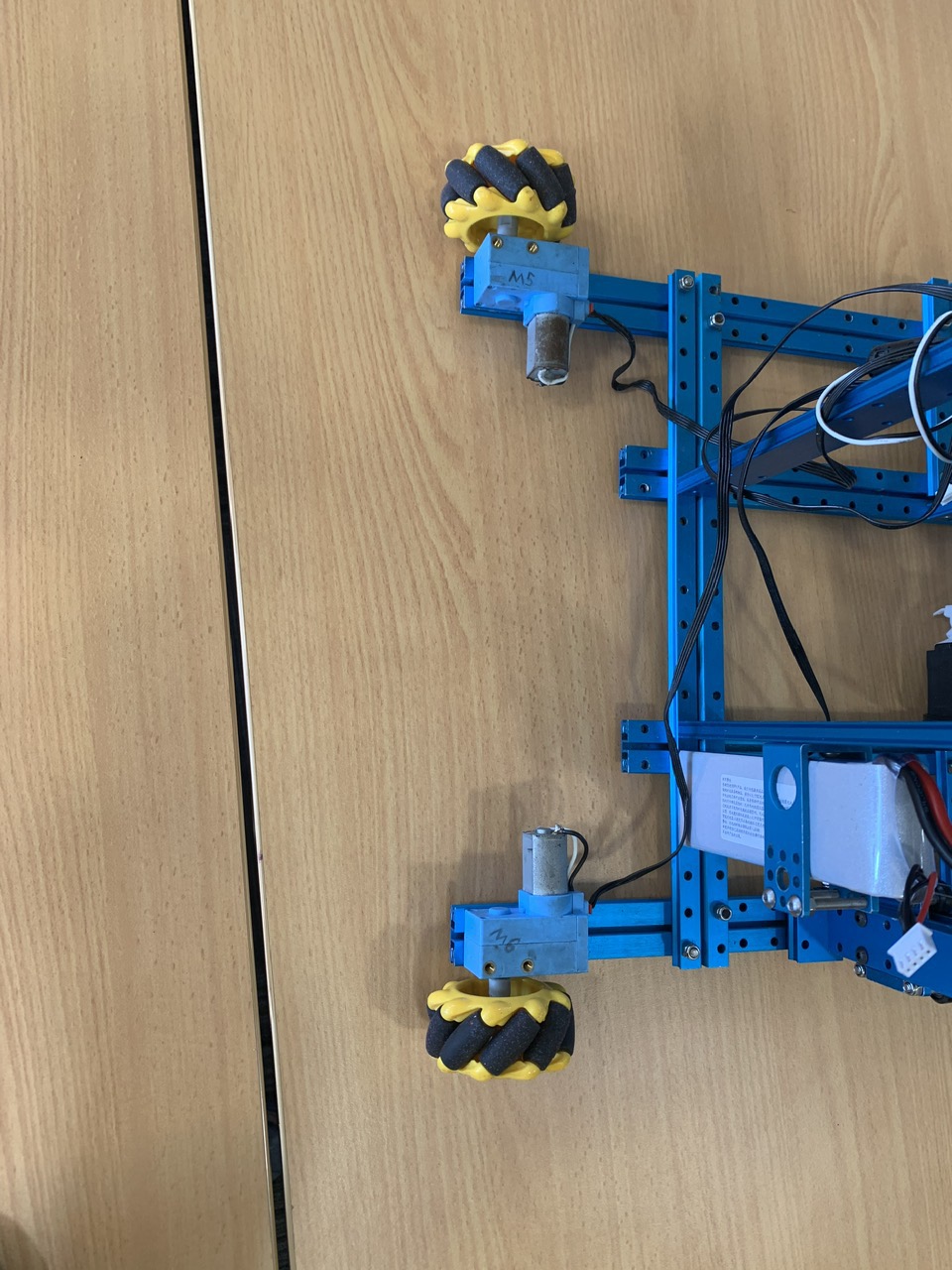
Front wheels

Back wheels
b. Advantages
- Ability to move back and forth, and sideway give drivers better control over the position of the robot
- Provide more flexible and agility even when one of the motor stop working compared to traditional wheels
c. Disadvantages
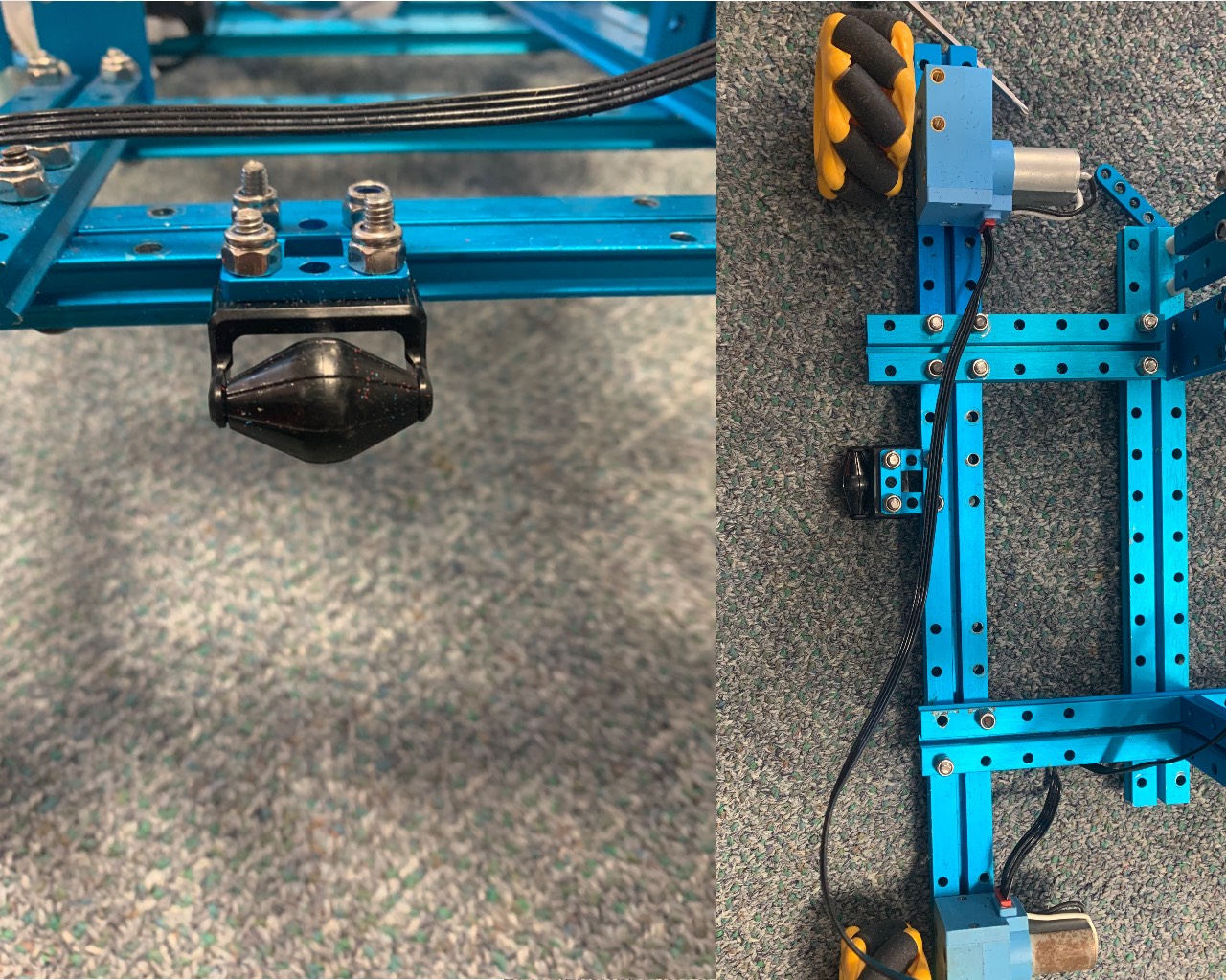
- The upper part of the robot have to handle multiple task, therefore, it is really heavy. The mechanum wheels are made of plastic and break very easily over long period of driving.
- To solve this, we added 2 caster wheels on 2 sides of the robot for extra support.
Intake Mechanism:
a. First part: Disc
- Taking inspiration from my previous project, the intake system utilize spining ziptie for both range and friction.
- To bring the disc from the ground the shooter system 70cm above the ground, we used a vertical conveyor system that extended from the intake..
- Having a 70cm long conveyer system also work as a storage space for 5 disc at a time.
b. Second part: Cube
- Intake for the cubes is simply a claw with one motor to open and close on one side.
Tasks-handling Mechanism:
a. For the discs
- For the shooting mechanism: we mount 2 jet motors with ridges wheel for friction. The wheels are placed horizontally, facing each other
- A second, horizontal conveyer line bridge the gap between the vertical conveyer and the shooting mechanism.
b. For the cubes
- The pulley system used one servo to move everything up and down.
- Because to pulley is hooked to one grab claw, only one cube/cone can be moved to the shelf at a time.
c. Disadvantages
- Stability is a huge downside of this design. Because we using ball bearing plastic wheels, the outer plastic piece often get dislocated due to the heavy weight of the pulley, the cube, and the grabbing claw.
- We decided to counter this by buying a bunch of plastic bearing wheels so we can replace the dislocated ones during the competition.
Coding
Code was writen using block code because we did not have enough development time: Download here